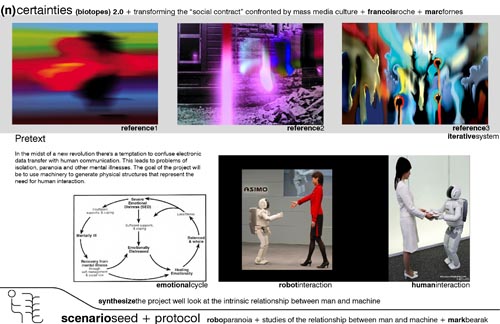
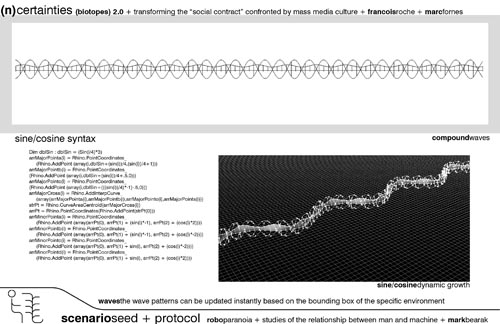

– In the midst of a new revolution there’s a temptation to confuse electronic data transfer with human communication. This leads to problems of isolation, paranoia and other mental illnesses. The goal of the project will be to use machinery to generate physical structures that represent the need for human interaction.
<!–[if !supportLists]–>– <!–[endif]–>The story of Theresa Duncan and Jeremy Blake is not uncommon. Humans use technological advances to further indulge their psychological predispositions. Mental ailments such as paranoia, schizophrenia, and depression can be fostered through a lack of direct human contact. The purpose of the robot will be to counteract these tendencies.
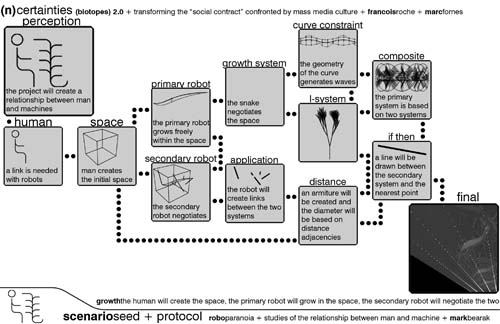
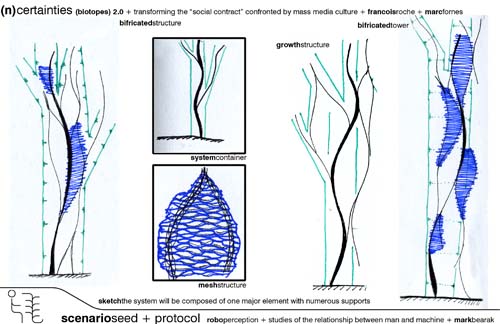
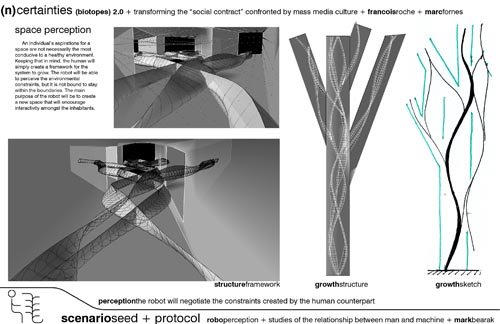
<!–[if !supportLists]–>– <!–[endif]–>An individual’s aspirations for a space are not necessarily the most conducive to a healthy environment. Keeping that in mind, the human will simply create a framework for the system to grow. The robot will be able to perceive the environmental constraints, but it is not bound to stay within the boundaries. The main purpose of the robot will be to create a new space that will encourage interactivity amongst the inhabitants.
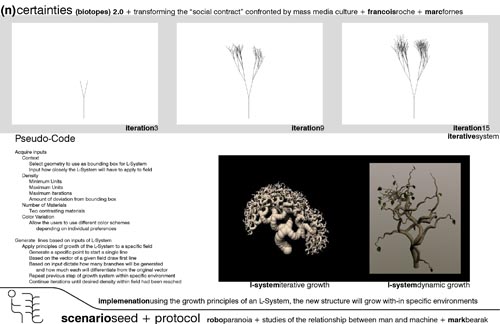
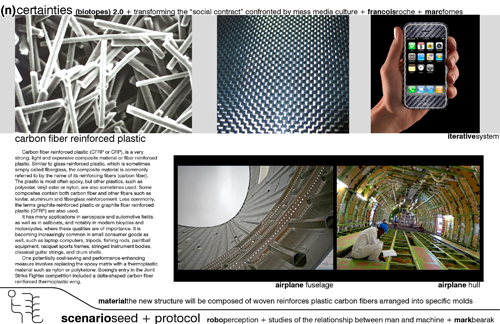
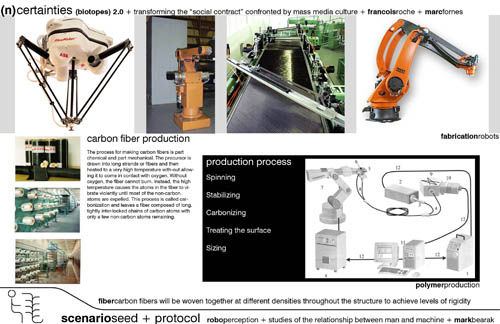
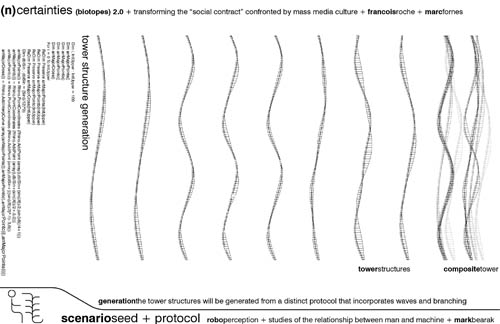
<!–[if !supportLists]–>– <!–[endif]–>The robot will use artifacts from an individual’s past and recycle the items into plastic. The once the material has been recycled it will be stored at the base of the structure until it is spun into fibers. At this point a robot will start to spin the fibers at different densities to create the structure. Once the initial structure has been finished, a secondary structure will be generated to create the habitable spaces within the initial structural system.
The preservation of the robot is dependent on human preservation















































































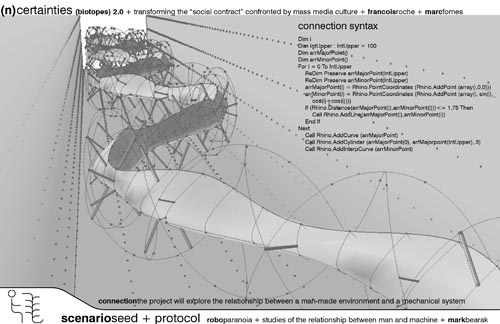
{kind=link}
{kind=link}
{kind=link}